In order to study the performance of the second-order control system, the relationship between the parameters ζ and ωn of the second-order control system and the unit step response is discussed. The simulation environment based on Matlab/Simulink software is introduced. Under the action of the unit step signal, the simulation example is very The simulation study of the second-order control system is well implemented. The simulation has direct observation and analysis of the output performance changes of the second-order control system, and fully reflects the intuitive and convenient simulation research using Matlab/Simulink.
0 Preface
Most of the actual control engineering is a complex high-order system, which can usually be decomposed into a superposition of several first-order inertia links and second-order oscillation links. In the process of studying complex control systems, the high-order systems are often simplified to the combination of second-order and lower-order systems by dominant pole and dipole cancellation methods, and then based on the analysis of the output and performance of the second-order control system. Correct the control system deviation to achieve high-end system performance that meets design specifications and usage requirements. Therefore, mastering the dynamic characteristics theory of the second-order control system and constructing the test system for the dynamic characteristics of the second-order control system can greatly simplify the system analysis and play an important role in the analysis and design of the control system.
Simulink is a Matlab-based software package for modeling, simulation and analysis of interactive dynamic systems. It can be used for system modeling, simulation, analysis, etc. for control systems. It is widely used in linear control systems and nonlinear. Modeling and simulation of control systems, digital control and digital signal processing. This paper introduces the simulation of the second-order control system based on the unit step signal in the Matlab/Simulink simulation environment. It directly observes and analyzes the output performance of the second-order control system, which fully reflects the simulation of Matlab/Simulink. And convenient features.
1 second-order control system model
A system that can be described by a second-order differential equation is called a second-order control system. In the practice of control engineering, second-order control systems are very common, such as armature-controlled DC motors, RLC networks, and mechanical-displacement systems consisting of spring-mass-dampers. In addition, many high-order systems are often studied approximately as second-order control systems under certain conditions. Therefore, it is of great practical significance to discuss and analyze the characteristics of the second-order control system in detail. The mathematical model structure of a typical second-order control system is shown in Figure 1.
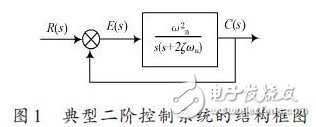
Its closed-loop transfer function is:
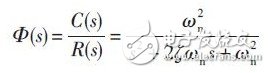
Where: ζ is the system damping ratio; ωn is the undamped natural oscillation angular frequency in rad/s. The dynamic characteristics of the second-order control system can be described by the above two parameters. The second-order control system can be divided into the following situations under the action of the unit step signal:
(1) When ζ = 0, the second-order control system is in a zero-damping state. The system has a pair of conjugate virtual roots, and the system unit step response is an undamped equal amplitude oscillation curve.
(2) When 0 "ζ", the second-order control system is under-damped. The pole of the system is a conjugate complex number, located in the left half plane of S. The system unit step response consists of two parts: steady state response and transient response. The steady state response is 1. The transient response is the oscillation attenuation process. The oscillation angular frequency is determined by the damping ratio ζ and the undamped natural oscillation angular frequency ωn. With the decrease of the cymbal, the amplitude of the oscillation increases.
(3) When ζ=1, the second-order control system is in a critical damping state. The system has two identical real poles, located in the left half of S. The system unit step response is no overshoot, no oscillation monotonous rise curve, there is no steady state error.
(4) When ζ》1, the second-order control system is over-damped. The system has two unequal real poles, located in the left half plane of S. The system unit step response is similar to the critical damping condition. It is a curve without overshoot and no monotonic rise of oscillation, but its transition process time is more than critical damping. long.
2 Second-order control system simulation design and research
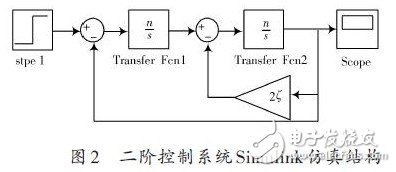
2.1 Second-order control system simulation structure design
Start Matlab 7.04 and enter the Simulink simulation interface. According to the mathematical model structure of the second-order control system, the Simu-link simulation structure of the second-order control system is shown in Figure 2. Double-click each function module, set the corresponding parameters in each parameter dialog box that appears, input the unit step signal during simulation, start time is 0, change the values ​​of ωn and ζ respectively, click the start command under the simula-TIon menu Simulation, double-click the oscilloscope module to observe the simulation results, get the step response curve of the system, and then analyze the influence of ωn and ζ on the dynamic performance of the system.
The road lamp lighting is a main light source configuration is most widely used in Road Lighting engineering,mainly is suitable for the city roads,lans wide road lighting and decoration,is the way the functional lighting products. Our company's road lighting products include Lotus Combination Lamp,High-low arm High-power LED lamps,Lift type High-mast lamp,Integrated Solar road light.




The main road generally use high-quality steel manufacturing,stable structure and generous,illumination power and the main rod highly visible road width of scientific allocation.To ensure that the surface brightness,no glare,uniform illumination.Long distance continuous configuration,can describe the spatial light continuous beauty,make city roads at night more grandeur.
Road Lighting Series,Road Lighting,Road Lighting Decoration,Road Lighting Book
Jiangsu chengxu Electric Group Co., Ltd , https://www.satislighting.com